System Architecture
The Arttous platform is powered by the ESP32-S3 (N8R8) Dual-Core SoC running FreeRTOS (Firmware IK4 = v75.4). To prevent I²C starvation during high-speed calculations, peripherals are hardware-split across two independent I²C buses.
Hardware Interfaces
| ESP32-S3 Pin | Function | Target |
|---|---|---|
| GPIO 4 | SDA (Bus 0) | PCA9685 (Servos) |
| GPIO 5 | SCL (Bus 0) | PCA9685 (Servos) |
| GPIO 6 | SDA (Bus 1) | MPU6050 (IMU) |
| GPIO 7 | SCL (Bus 1) | MPU6050 (IMU) |
| GPIO 38 | DATA | RGB Status LED |
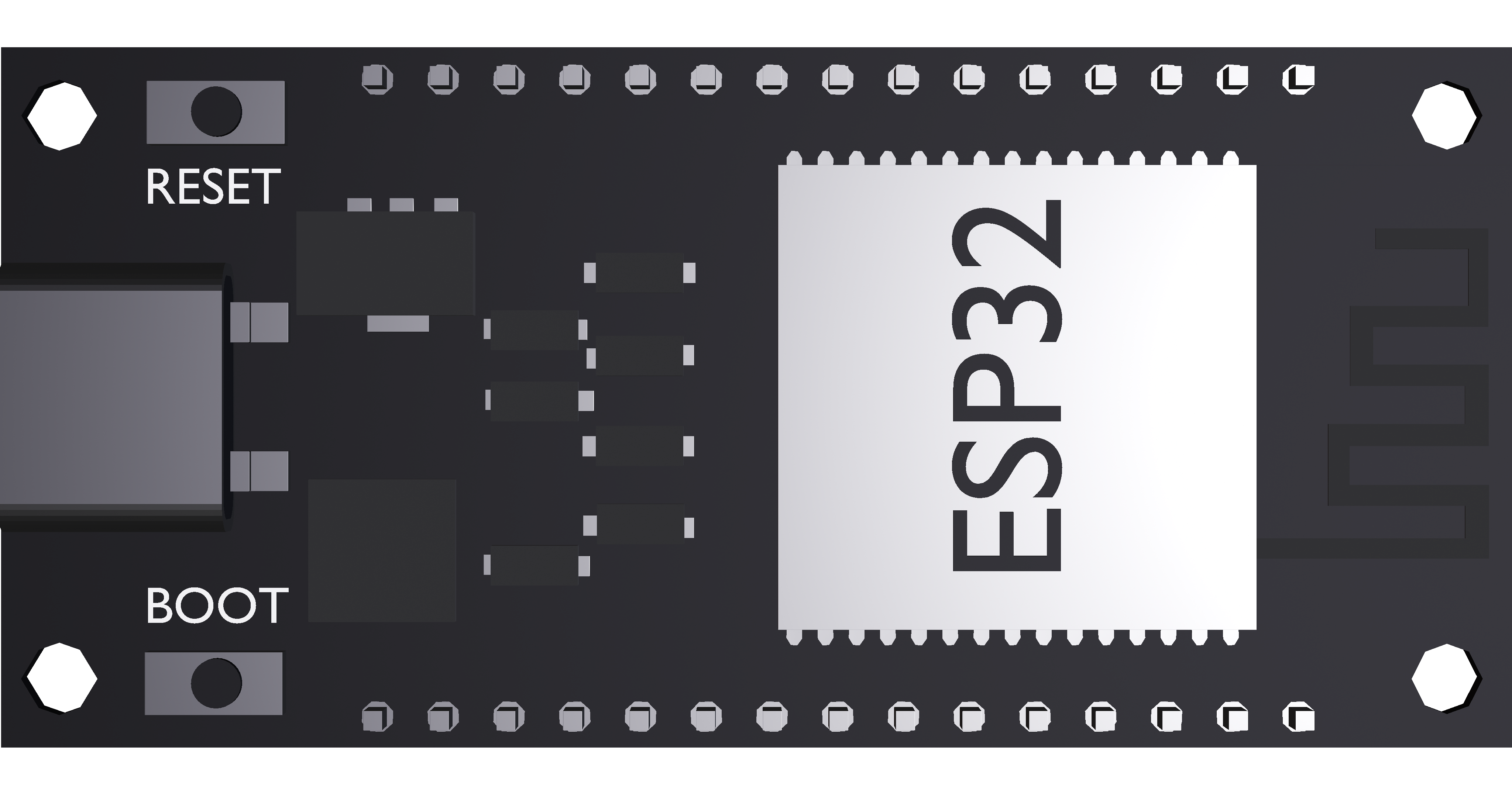
Fig 1.0 — ESP32-S3 Compute Unit
FreeRTOS Task Management
The standard single-threaded loop has been entirely deprecated. Processing is locked to dedicated silicon cores to ensure the Kinematic Engine never misses a 50 Hz deadline.
Core 0 — TaskNetwork
Priority: 1 · Unpinned
Handles asynchronous events: WiFi, HTTP server rendering, and WebSocket JSON telemetry broadcast every 100ms. Non-blocking.
Core 1 — TaskControl
Priority: 2 · Strict 50 Hz (20ms loop)
Executes IMU sensor fusion, Inverse Kinematics (Law of Cosines), Smooth Amplitude Decay, and generates hardware PWM signals.
Memory secured via SemaphoreHandle_t stateMutex to prevent race conditions during payload parsing.
Bill of Materials
ESP32-S3 (N8R8)
Dual-Core · FreeRTOS
Primary logic board. Handles matrix math and dual I²C routing.
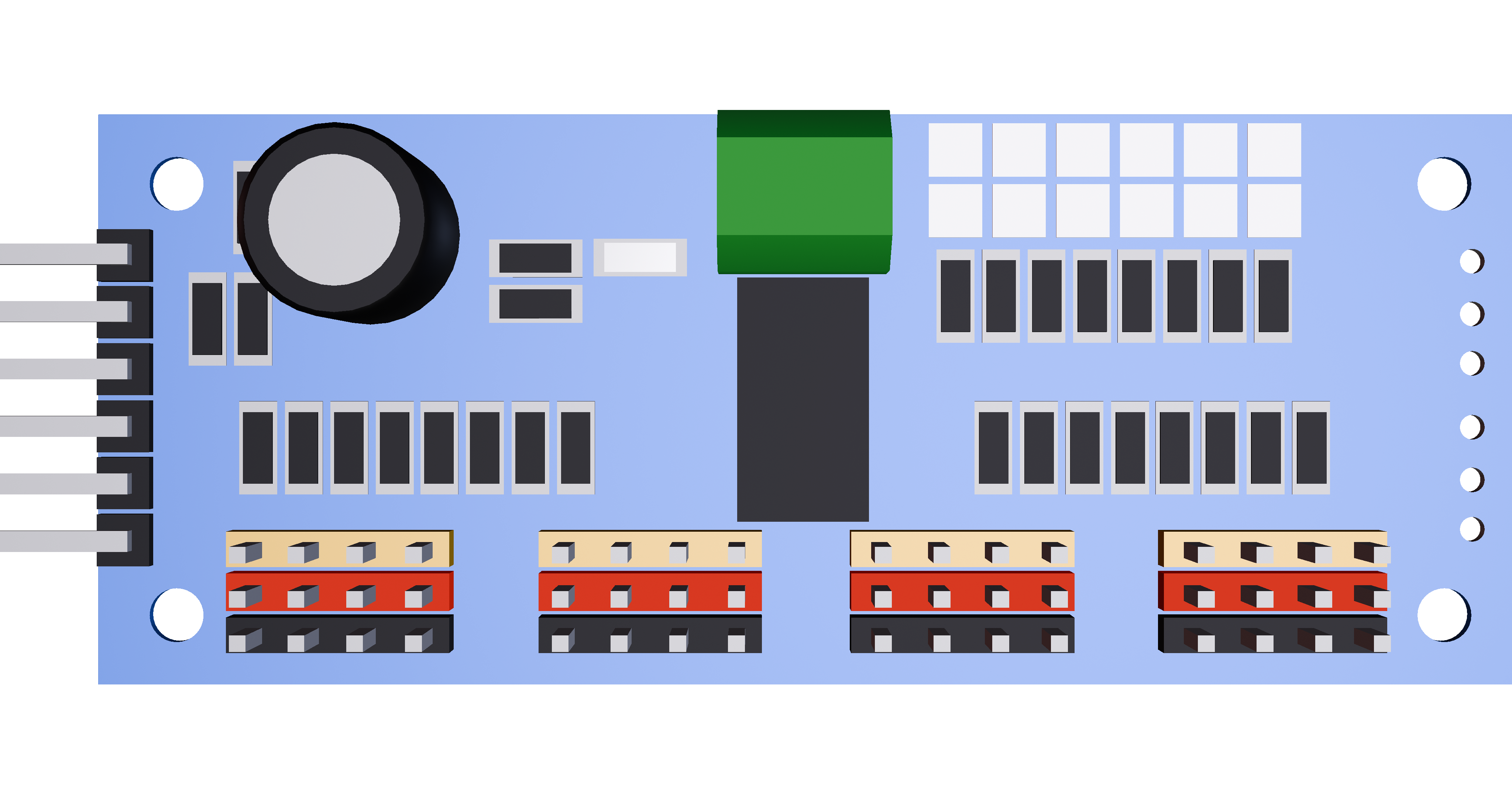
PCA9685
16-Channel PWM · Bus 0
Dedicated servo driver. Offloads PWM generation for jitter-free legs.
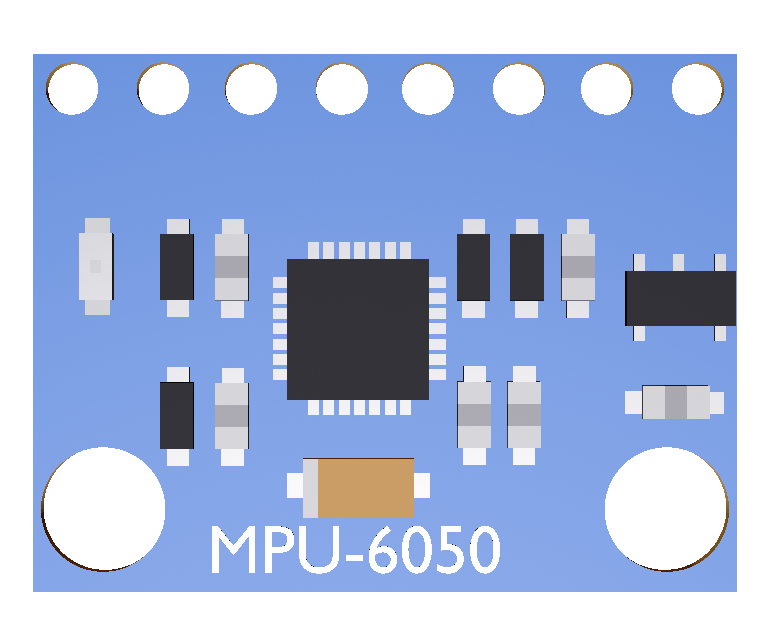
MPU6050 IMU
6-DOF Sensor · Bus 1
Provides Pitch/Roll data for active Z-axis gravity compensation.

MG90S Servos
Metal Gear · High Torque
Actuators for the 3DOF legs, driven dynamically by the IK engine.

Print Filament
PETG-CF / TPU 95A
Carbon-fibre PETG for chassis rigidity, TPU for high-friction foot pads.
Mechanical Assembly
Reference schematics for chassis assembly and frame orientation.
Frame Orientation A

Top Plate Alignment
Dual I²C Wiring Schematic
ESP32 (GPIO 4)PCA9685 (SDA)
ESP32 (GPIO 5)PCA9685 (SCL)
ESP32 (GPIO 6)MPU6050 (SDA)
ESP32 (GPIO 7)MPU6050 (SCL)
Battery (7.4V)PCA9685 (V+)
Kinematics API & Stabilisation
3DOF solver with active IMU balancing and NaN-protection clamps. Runs exclusively on Core 1.
// 1. Active Z-Axis Balancing (IMU Sensor Fusion)
float p = constrain(pitch, -20.0f, 20.0f) * (PI_F/180.0f);
float r = constrain(roll, -20.0f, 20.0f) * (PI_F/180.0f);
balZ[i] = (lx * sin(p)) + (ly * sin(r));
// 2. Smooth Amplitude Decay (Soft leg parking)
smoothVx += (targetVx - smoothVx) * (4.0f * dt);
float lz = (currentHeight + gait.legZ[i]) - balZ[i];
// 3. Law of Cosines (NaN Protection Clamp prevents CPU crash)
float D = sqrt(u*u + lz*lz);
float cA = constrain((FEMUR_SQ + D*D - TIBIA_SQ) / (2.0f * FEMUR * D), -1.0f, 1.0f);
float alpha = acos(cA);
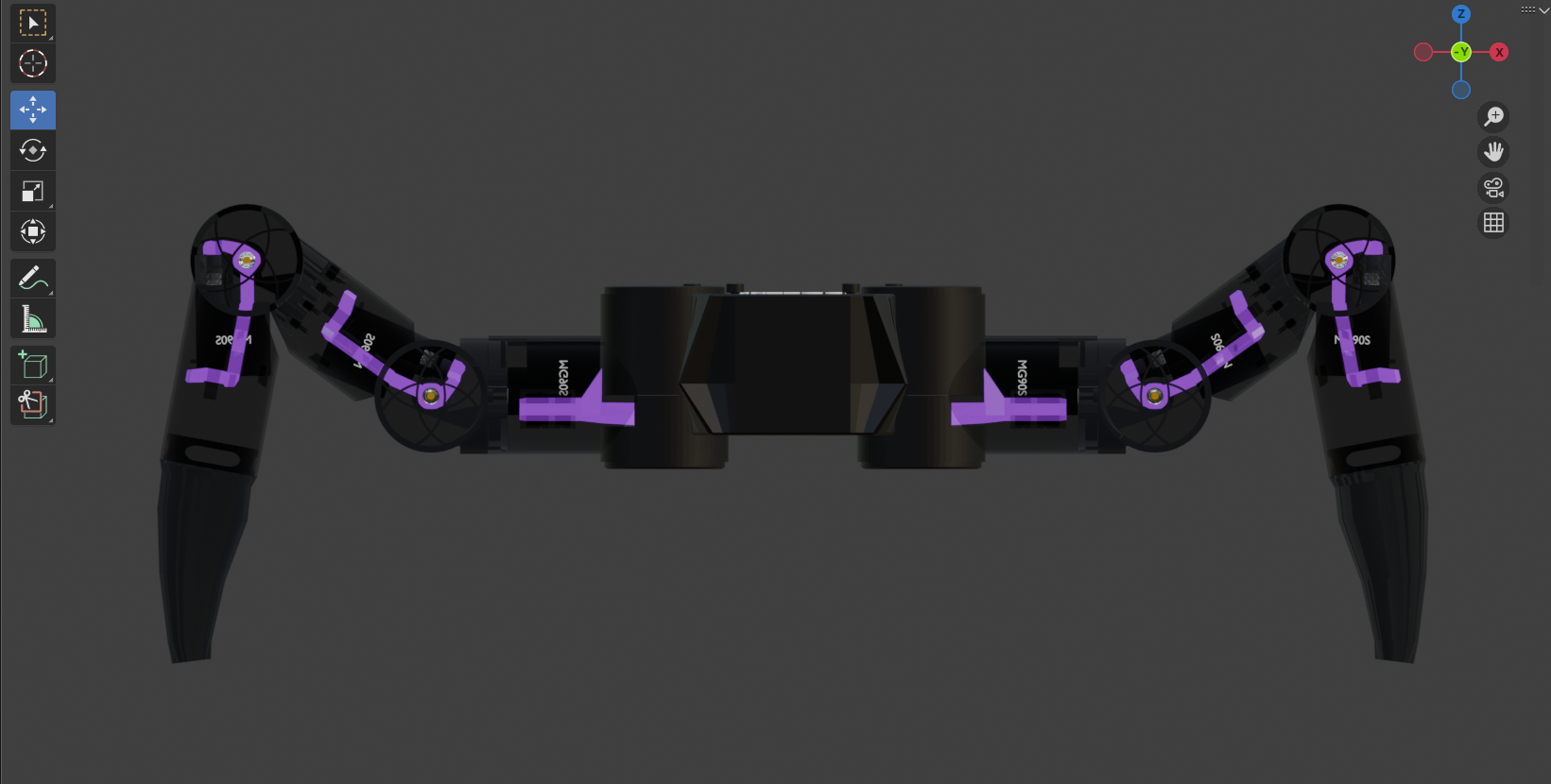
Web UI & Digital Twin
Zero-install, browser-based Mission Control served directly from the ESP32-S3's PROGMEM.
Telemetry & Control Architecture
- —Rendering: WebGL via Three.js for 60 FPS 3D wireframe visualisation.
- —Transport: Core 0 handles WebSockets (Port 81) broadcasting JSON telemetry at 100ms intervals.
- —Flight Deck: Real-time Pitch/Roll horizon, auto-gait toggles, dual virtual joysticks via Gamepad API.
- —Engineering: Direct Kinematics API access — manipulate Coxa, Femur, Tibia, and Twist axes.

Fig 2.0 — Digital Twin Interface