Firmware v75.4 Feature
Zero-Install
Digital Twin
Digital Twin
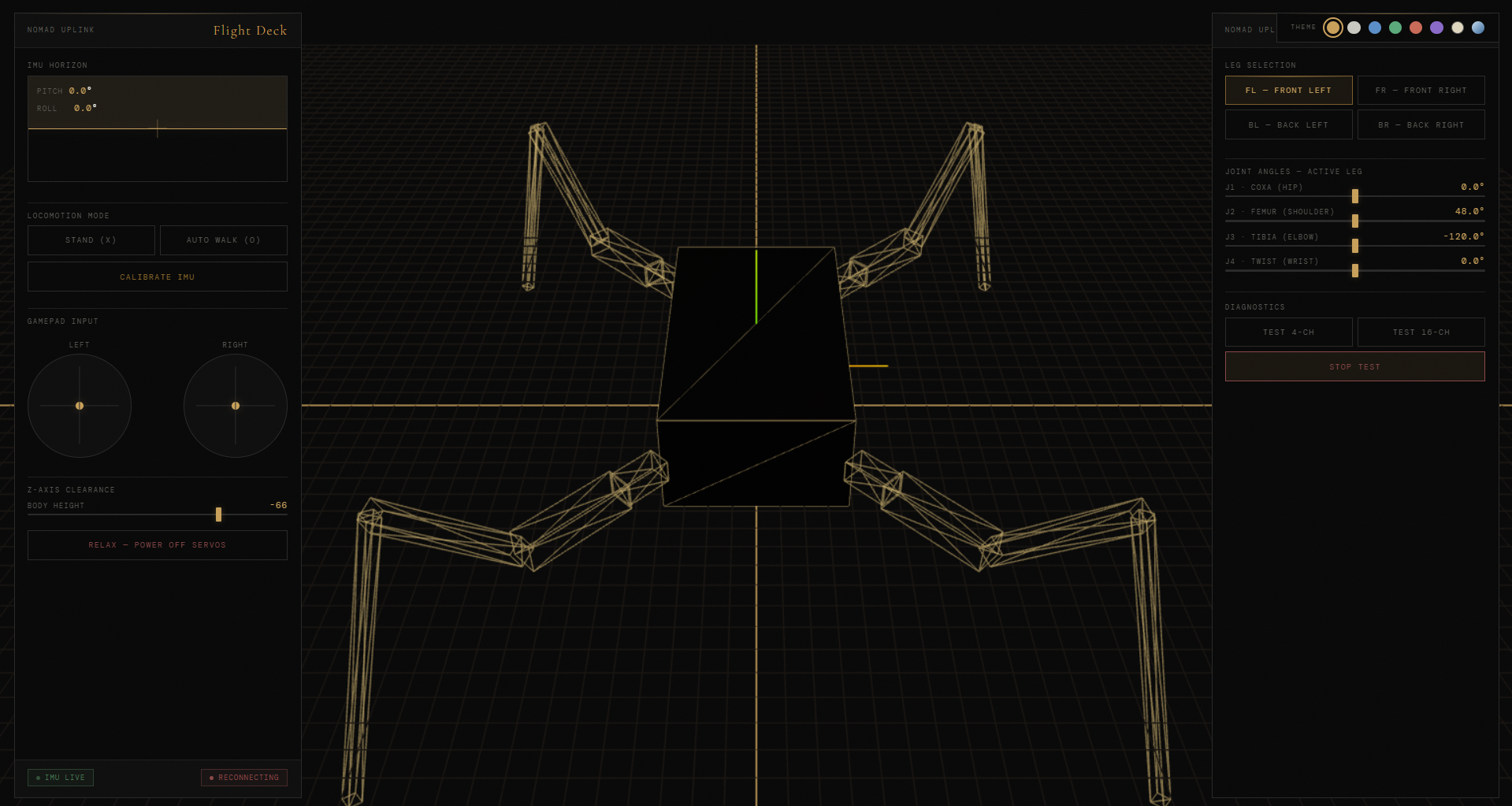
Command your fleet from any browser, anywhere. The Arttous ESP32-S3 serves a fully optimised WebGL interface directly from onboard PROGMEM — no app store, no install, no cloud dependency. The UI renders a real-time 3D wireframe of the robot's actual joint angles, updated live via WebSockets.
Render EngineThree.js WebGL
Telemetry Latency< 50ms WebSocket
Served FromESP32-S3 PROGMEM
Installation RequiredNone
Control InputHTML5 Gamepad API
Visual AxesCoxa · Femur · Tibia · Twist